 V2X HIL 测试 华测检测
V2X HIL 测试 华测检测 
V2X HIL 测试
智能网联汽车一站式V2X HIL 测试整体方案
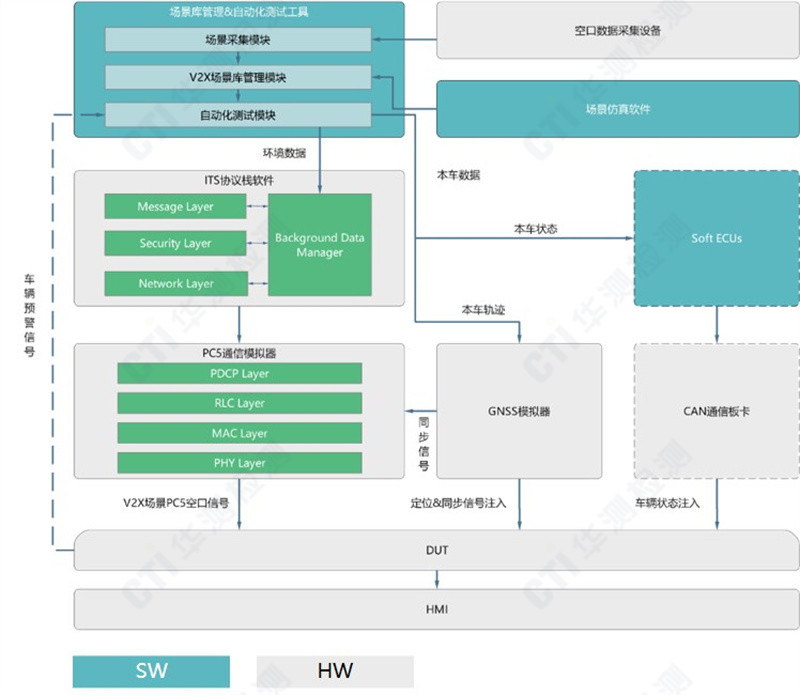
CTI华测检测V2X HIL测试系统由场景库管理&自动化测试、场景仿真软件、ITS 协议栈软件、GNSS模拟器等场景模块组成。为您提供一站式V2X HIL测试整体方案。
服务背景
V2X是Vehicle to Everything的缩写,直译过来的意思是车联万物-车联网 ,具体指的是V2V,V2I,V2P和V2N。通过V2X技术,车辆得以发送和接收到其他车辆、道路等参照物的通信信号,得知视野范围外的路况信息,从而通知车辆本身,避免事故的发生。
HIL全称为Hardware-in-the-loop,HIL测试在MIL,SIL和PIL的基础上引入真实的待测物进行测试。可有效地对单个系统进行测试,避免集成后智能网联汽车因零部件繁杂,多系统硬件和软件并行开发等原因,容易在集成后产生的严重BUG。
CTI华测检测V2X HIL测试系统由场景库管理&自动化测试、场景仿真软件、ITS 协议栈软件、GNSS模拟器等场景模块组成。为您提供一站式V2X HIL测试整体方案。
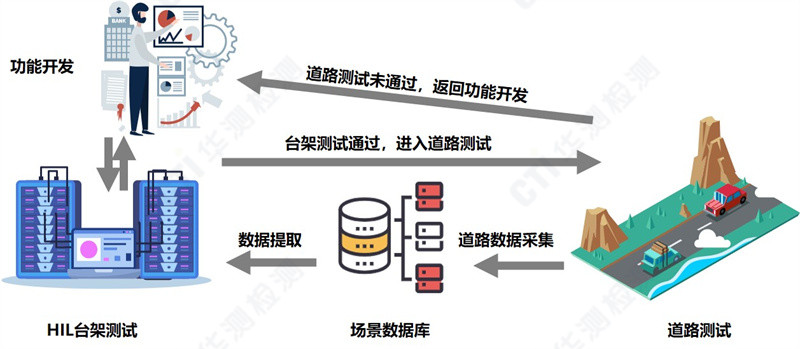
智能网联研发流程
在道路测试前,利用HIL系统完成应用场景算法、终端通信性能及数据一致性等测试内容,同时将道路测试数据采集到场景数据库,进一步支撑HIL测试,形成功能开发—HIL测试—道路测试的闭环研发验证测试能力。
V2X HIL整体方案
| 场景数据多源选择 | 自动化批量测试 |
| 既支持基于空口数据采集设备对外场实车测试过程的录制回放,又支持基于场景仿真软件的场景搭建。 | 基于标准的测试场景数据,附带预警评判准则,通过DUT预警和评判准则比对,实现自动批量测试,生成测试报告。 |
| 协议栈快速迭代 | 智能驾驶联合仿真 |
| 协议栈版本紧跟相关标准制定,快速迭代更新,以支持各协议栈版本DUT的测试任务。 | 结合用户需求,拓展车辆动力学和Soft ECU模型仿真,实现V2X与AD/ADAS功能的联合仿真。 |
场景库管理&自动化测试

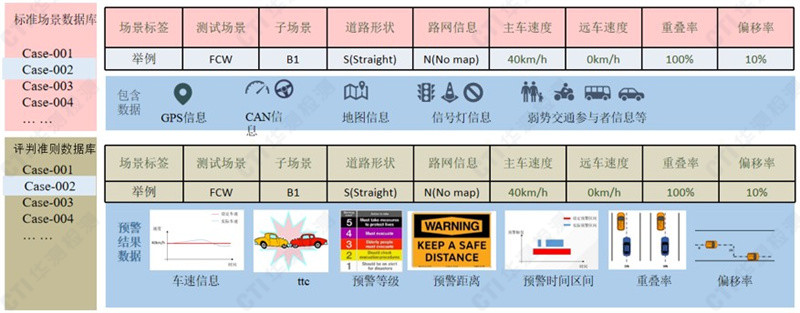
场景库格式
| 标准场景库 | 通用场景库 |
|---|---|
| ● 基于《 V2X系统预警应用功能测试与评价规程》中的场景设计与评价标准 |
● 包含更丰富的场景 |
| ● 对应评判准则数据库,用于验证产品能否通过测试标准 |
● 用于提高产品鲁棒能力 |
场景仿真软件
基于场景仿真软件Carla,深度开发可支持第一、二阶段消息集的V2X功能模块,可将场景数据序列化为标准消息集的asn.1编码,并生成场景回放帧到场景库。

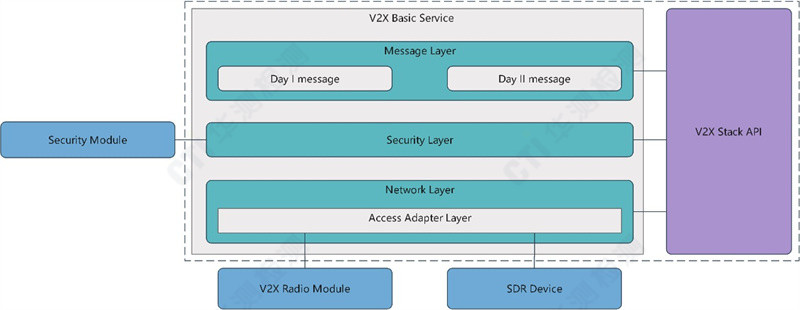
ITS 协议栈软件
ITS协议栈软件,支持第一、二阶段标准消息集,通过协议一致性认证,对场景仿真软件提供的环境数据进行封装。
GNSS模拟器
R&S SMBV100B支持所有可能的场景,包括从简单的单颗、静态卫星设置到使用24颗动态卫星实时生成的灵活场景。支持GPS, Galileo, GLONASS, BeiDou制式的卫星信号模拟,且支持通过使用多径信号生成,建模各种大气效应和周边建组、桥梁、或者模拟实际车辆动态仿真实际传输和信号接收环境。

测试设备
| 类别 | 项目 | 描述 | 明细 |
| SW | ITS协议栈 | 消息层、网络层、安全层数据封装 | V2X ITS协议栈授权 |
| 场景库及自动化测试软件 | 场景库管理模块 | 场景数据采集、解析及管理模块 | |
| 自动化测试模块 | 数据回放测试,预期结果生成,测试报告生成模块 | ||
| 标准场景 | 基于一阶段标准搭建的16个测试场景 | ||
| Carla V2X功能包 | 场景仿真软件 | 基于Carla二次开发的V2X功能支持 | |
| Vector CANoe | 总线开发工具 | ECU节点模拟与总线信号模拟 | |
| HW | Vector VN5610A/VN1630 | Ethernet/CAN接口设备 | 模拟以太网/CAN信号 |
| T-Station Sim/R&S CMW500 | PC5空口数据模拟器 | 模拟PC5空口数据的收发 | |
| R&S SMBV100B | GNSS 模拟器 | 支持GPS, Galileo, GLONASS, BeiDou制式的卫星信号模拟 |











为品质生活传递信任
 一键下单 流程透明
一键下单 流程透明 专业服务 权威公正
专业服务 权威公正 传递信任 彰显品质
传递信任 彰显品质 根植中国 服务世界
根植中国 服务世界

热线电话